|
|
| MOQ: | 1 |
| Preis: | 1500$ |
| Standardverpackung: | 169 cm (H), 75 cm (B), 30 cm (L) |
| Lieferfrist: | 1 Monat |
| Lieferkapazität: | 99 Einheiten |
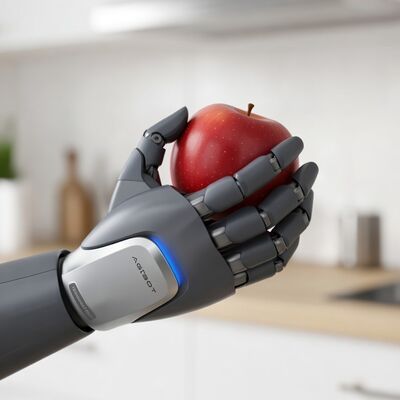
Die neue AGIBOT OmniHand Pro 2025 Fünf-Finger-Humanobot-Hand ist ein fortschrittlicher Roboter-End-Effektor, der die Bewegung der menschlichen Hand mit Präzision und Flexibilität nachahmen soll.Diese fünffingerige Roboterhand unterstützt koordinierte Fingerbewegungen, hochpräzises Greifen und intelligentes Kraftfeedback für komplexe Manipulationsarbeiten.
OmniHand Pro 2025 eignet sich für humanoide Roboter, Serviceroboter, Forschungsplattformen und industrielle Roboterarme, die natürliche Handbewegung erfordern.adaptive Gegenstandshandhabung und sichere Mensch-Roboter-Interaktion.
Jeder Finger kann sich unabhängig bewegen, um natürliche Greifen und Manipulationen ähnlich wie die menschliche Handbewegung auszuführen.
Die integrierten Kraft- und Taktilsensoren ermöglichen eine anpassungsfähige Griffsteuerung anhand der Objektform, des Gewichts und der Zerbrechlichkeit.
Eine reibungslose und präzise Steuerung mehrerer Gelenke ermöglicht eine heikle Handhabung und komplexe Manipulationsarbeiten.
Erweiterte digitale Steuerungsalgorithmen ermöglichen eine schnelle Bewegung und Echtzeit-Anpassung für einen stabilen Betrieb.
Unterstützt die Integration mit humanoiden Robotern, Roboterarmen und Servicerobotern durch Standardkommunikation und Montage-Schnittstellen.
Flexible Konfigurationsmöglichkeiten ermöglichen die Anpassung an bestimmte Aufgaben oder Robotersysteme.
| Artikel | Spezifikation |
|---|---|
| Art der Ware | Fünffingerige humanoide Roboterhand |
| Grade der Freiheit | Mehrfachgelenkte unabhängige Finger |
| Kontrollmethode | Intelligente digitale Steuerung |
| Empfindung | Kraft- und taktile Rückkopplung |
| Vereinbarkeit | Humanoide Roboter und Roboterarme |
| Kommunikation | Standard-Roboter-Schnittstellen |
| Integration | Modularer Aufbau und Steuerung |
| Stromversorgung | Antrieb durch äußeres System |
| Betriebsumfeld | Industrie- und Forschungsräume im Innenbereich |
Die Spezifikationen können je nach Konfiguration variieren.
Der AGIBOT OmniHand Pro 2025 kombiniert menschlich-ähnliches mechanisches Design mit intelligenter Sensorik und Steuerung, um die nächste Generation von humanoiden Robotern und fortschrittlichen Roboterplattformen zu unterstützen.Es bietet eine hohe Leistungsmanipulation und erhöhte Flexibilität für zukünftige Anwendungen.
Es ist eine fünffingerige humanoide Roboterhand, die für fortschrittliche Manipulation und menschliche Bewegung in der Robotik entwickelt wurde.
Sie unterstützt die Integration mit humanoiden Robotern, Roboterarmen und Service-Robotern über Standard-Schnittstellen.
Es kann greifen, handhaben, Gegenstandsmanipulation und empfindliche Aufgaben ausführen, die Präzision und anpassungsfähige Steuerung erfordern.
Integrierte Kraft- und Taktilsensoren erlauben eine adaptive Griffsteuerung basierend auf Kontaktfeedback.
Ja, es wird in KI-Roboterforschungslabors und Lehrumgebungen für fortgeschrittene Manipulationsstudien verwendet.
Sein modulares Design ermöglicht die Anpassung an unterschiedliche Anwendungen und Systemanforderungen.
|
|
| MOQ: | 1 |
| Preis: | 1500$ |
| Standardverpackung: | 169 cm (H), 75 cm (B), 30 cm (L) |
| Lieferfrist: | 1 Monat |
| Lieferkapazität: | 99 Einheiten |
Die neue AGIBOT OmniHand Pro 2025 Fünf-Finger-Humanobot-Hand ist ein fortschrittlicher Roboter-End-Effektor, der die Bewegung der menschlichen Hand mit Präzision und Flexibilität nachahmen soll.Diese fünffingerige Roboterhand unterstützt koordinierte Fingerbewegungen, hochpräzises Greifen und intelligentes Kraftfeedback für komplexe Manipulationsarbeiten.
OmniHand Pro 2025 eignet sich für humanoide Roboter, Serviceroboter, Forschungsplattformen und industrielle Roboterarme, die natürliche Handbewegung erfordern.adaptive Gegenstandshandhabung und sichere Mensch-Roboter-Interaktion.
Jeder Finger kann sich unabhängig bewegen, um natürliche Greifen und Manipulationen ähnlich wie die menschliche Handbewegung auszuführen.
Die integrierten Kraft- und Taktilsensoren ermöglichen eine anpassungsfähige Griffsteuerung anhand der Objektform, des Gewichts und der Zerbrechlichkeit.
Eine reibungslose und präzise Steuerung mehrerer Gelenke ermöglicht eine heikle Handhabung und komplexe Manipulationsarbeiten.
Erweiterte digitale Steuerungsalgorithmen ermöglichen eine schnelle Bewegung und Echtzeit-Anpassung für einen stabilen Betrieb.
Unterstützt die Integration mit humanoiden Robotern, Roboterarmen und Servicerobotern durch Standardkommunikation und Montage-Schnittstellen.
Flexible Konfigurationsmöglichkeiten ermöglichen die Anpassung an bestimmte Aufgaben oder Robotersysteme.
| Artikel | Spezifikation |
|---|---|
| Art der Ware | Fünffingerige humanoide Roboterhand |
| Grade der Freiheit | Mehrfachgelenkte unabhängige Finger |
| Kontrollmethode | Intelligente digitale Steuerung |
| Empfindung | Kraft- und taktile Rückkopplung |
| Vereinbarkeit | Humanoide Roboter und Roboterarme |
| Kommunikation | Standard-Roboter-Schnittstellen |
| Integration | Modularer Aufbau und Steuerung |
| Stromversorgung | Antrieb durch äußeres System |
| Betriebsumfeld | Industrie- und Forschungsräume im Innenbereich |
Die Spezifikationen können je nach Konfiguration variieren.
Der AGIBOT OmniHand Pro 2025 kombiniert menschlich-ähnliches mechanisches Design mit intelligenter Sensorik und Steuerung, um die nächste Generation von humanoiden Robotern und fortschrittlichen Roboterplattformen zu unterstützen.Es bietet eine hohe Leistungsmanipulation und erhöhte Flexibilität für zukünftige Anwendungen.
Es ist eine fünffingerige humanoide Roboterhand, die für fortschrittliche Manipulation und menschliche Bewegung in der Robotik entwickelt wurde.
Sie unterstützt die Integration mit humanoiden Robotern, Roboterarmen und Service-Robotern über Standard-Schnittstellen.
Es kann greifen, handhaben, Gegenstandsmanipulation und empfindliche Aufgaben ausführen, die Präzision und anpassungsfähige Steuerung erfordern.
Integrierte Kraft- und Taktilsensoren erlauben eine adaptive Griffsteuerung basierend auf Kontaktfeedback.
Ja, es wird in KI-Roboterforschungslabors und Lehrumgebungen für fortgeschrittene Manipulationsstudien verwendet.
Sein modulares Design ermöglicht die Anpassung an unterschiedliche Anwendungen und Systemanforderungen.