

|
|
ABB-Roboterarm IRB4600 CNC-Roboter mit elektrischem Greifer für Auswahl- und Platzarbeit mit verbiegender Maschine

| Roboterversion | Positionswiederholbarkeit RP (Millimeter) | Wegwiederholbarkeit Funktelegrafie (Millimeter) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Roboterversionen | Reichweite (M) | Nutzlast (Kilogramm) | Armload (Kilogramm) | |
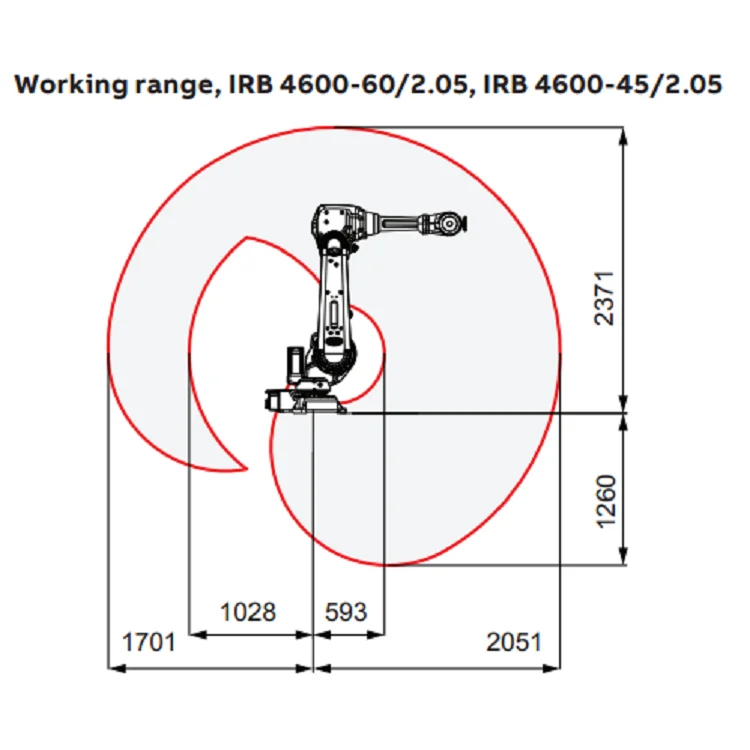
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
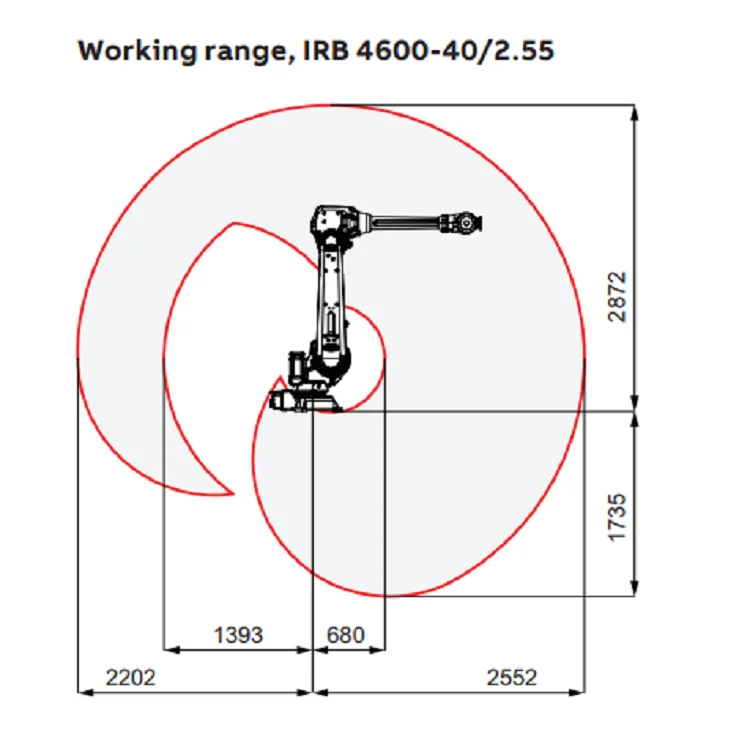
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Zahl von Äxten | 6+3 extern (bis 36 mit MultiMove) | |||
| Schutz | Standard-IP67, als Wahl Gießerei plus 2 | |||
| Montage | Boden, Regal, umgewandelt oder gekippt | |||
| Prüfer | Einzelnes Kabinett IRC5, | |||

|
|
ABB-Roboterarm IRB4600 CNC-Roboter mit elektrischem Greifer für Auswahl- und Platzarbeit mit verbiegender Maschine
| Roboterversion | Positionswiederholbarkeit RP (Millimeter) | Wegwiederholbarkeit Funktelegrafie (Millimeter) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Roboterversionen | Reichweite (M) | Nutzlast (Kilogramm) | Armload (Kilogramm) | |
| IRB 4600 60/2.05 | 2,05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2,05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2,55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2,51 | 20 | 11 | |
| Zahl von Äxten | 6+3 extern (bis 36 mit MultiMove) | |||
| Schutz | Standard-IP67, als Wahl Gießerei plus 2 | |||
| Montage | Boden, Regal, umgewandelt oder gekippt | |||
| Prüfer | Einzelnes Kabinett IRC5, | |||


