

|
|
industrieller cnc-Roboterarm Achse des Armes ABB IRB4400 6 des malenden Roboters mit linearem Verfolger und Roboterabdeckungs- und linearemverfolger

| Roboterversion | Reichweite (M) | Nutzlast (Kilogramm) | ||
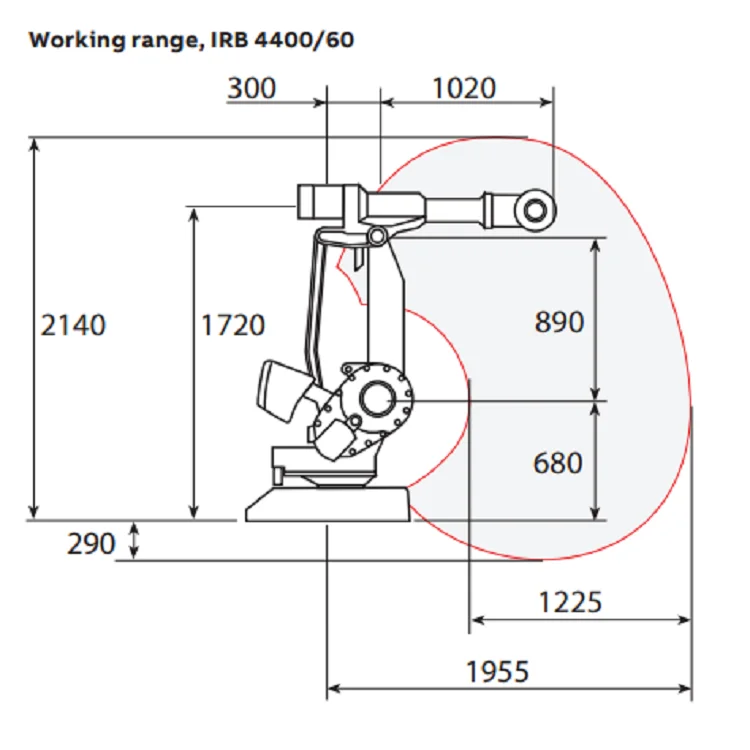
| IRB 4400-60/1.96 | 1,96 | 60 | ||
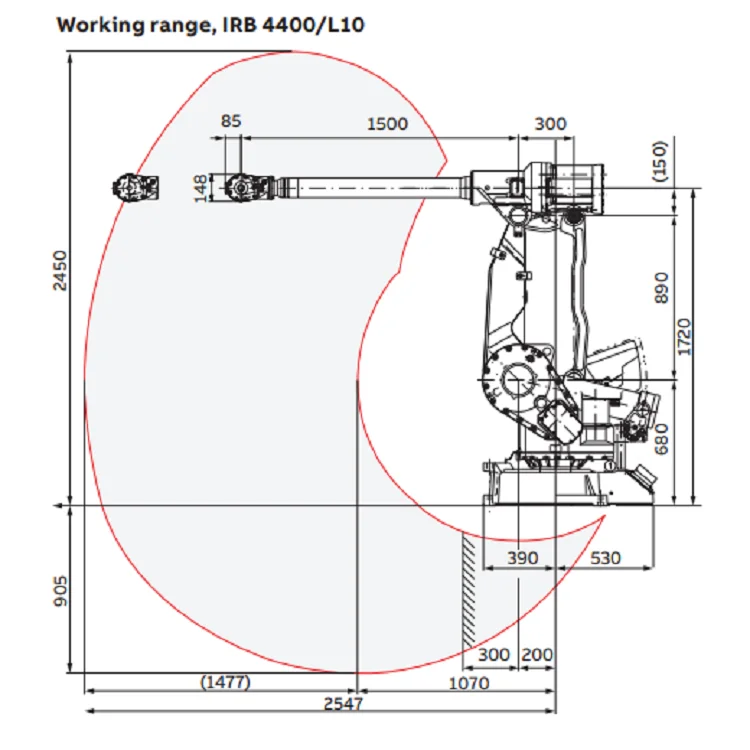
| IRB 4400L-10/2.53 | 2,53 | 10 | ||
| Ergänzungslast | ||||
| auf Achse 2 | 35 Kilogramm | |||
| auf Achse 3 | 15 Kilogramm | |||
| auf Achse 4 | 0-5 Kilogramm | |||
| Zahl von Äxten | 6 | |||
| Schutz | Standardversion IP 54, Gießerei-Plus 2 IP 67 und Hochdruckdampf waschbar | |||
| Montage | Boden | |||
| Prüfer | Einzelnes Kabinett IRC5 | |||
| Integrierte Signalversorgung | 23 Signale und Oberarm 10 Energie an | |||
| Integrierte Luftzufuhr | Stange des Maximums 8 auf Oberarm | |||
| Roboterversion | Positionswiederholbarkeit RP (Millimeter) | Wegwiederholbarkeit Funktelegrafie (Millimeter) *: |
| IRB 4400-60/1.96 | 0,06 | 0,09 |
| IRB 4400L-10/2.53 | 0,05 | 0,16 |

|
|
industrieller cnc-Roboterarm Achse des Armes ABB IRB4400 6 des malenden Roboters mit linearem Verfolger und Roboterabdeckungs- und linearemverfolger
| Roboterversion | Reichweite (M) | Nutzlast (Kilogramm) | ||
| IRB 4400-60/1.96 | 1,96 | 60 | ||
| IRB 4400L-10/2.53 | 2,53 | 10 | ||
| Ergänzungslast | ||||
| auf Achse 2 | 35 Kilogramm | |||
| auf Achse 3 | 15 Kilogramm | |||
| auf Achse 4 | 0-5 Kilogramm | |||
| Zahl von Äxten | 6 | |||
| Schutz | Standardversion IP 54, Gießerei-Plus 2 IP 67 und Hochdruckdampf waschbar | |||
| Montage | Boden | |||
| Prüfer | Einzelnes Kabinett IRC5 | |||
| Integrierte Signalversorgung | 23 Signale und Oberarm 10 Energie an | |||
| Integrierte Luftzufuhr | Stange des Maximums 8 auf Oberarm | |||
| Roboterversion | Positionswiederholbarkeit RP (Millimeter) | Wegwiederholbarkeit Funktelegrafie (Millimeter) *: |
| IRB 4400-60/1.96 | 0,06 | 0,09 |
| IRB 4400L-10/2.53 | 0,05 | 0,16 |

